Assembly Guide for RedBot with Shadow Chassis a learn.sparkfun.com tutorial
Available online at: http://sfe.io/t337
Introduction
The RedBot is robotic development platform capable of teaching basic robotics and sensor integration! Based on the SparkFun RedBoard and programmable in the Arduino environment, the RedBot has all the I/O you need to make a small robot in no time at all. This guide covers the new Shadow Chassis for the RedBot.
Image may be NSFW.
Clik here to view.
NOTE: We recommend that you read all of the directions first, before building your RedBot.
RedBot Kit vs. SIK for RedBot
This tutorial will cover how to install all the parts in the SparkFun RedBot Kit and the SparkFun Inventor’s Kit for RedBot (SIK for RedBot).
RedBot Kit
If you have the RedBot Kit, you can skip the steps marked with (SIK).
Image may be NSFW.
Clik here to view.
Alternatively, you can pick up additional sensors to install on your RedBot. These parts include the Wheel Encoder Kit, RedBot Buzzer, and twoRedBot Mechanical Bumpers. Follow the sections in this guide that covers any of the extra sensors you might have.
SIK for RedBot
If you have the SIK for RedBot, you can follow all the sections in this guide, including those marked with (SIK).
Image may be NSFW.
Clik here to view.
Materials
The RedBot kit contains the following pieces. SIK-only parts are noted with an asterisk (*).
Image may be NSFW.
Clik here to view.
| Part | Qty | |
|---|---|---|
| A | Bottom Chassis Plate | 1 |
| B | Top Chassis Plate | 1 |
| C | Front Motor Mount | 2 |
| D | Rear Motor Mount | 2 |
| E | Side Strut | 4 |
| F | Encoder Mount | 2 |
| G | Mainboard Mount | 2 |
| H | Battery Pack Clip | 1 |
| I | Line Follower Mount | 1 |
| J | Line Follower Mount Plate | 1 |
| K | Motor | 2 |
| L | Wheel | 2 |
| M | Nub Caster | 1 |
| N* | Encoder Magnet Plate (SIK) | 2 |
| O* | Encoder Hall Effect Sensor (SIK) | 2 |
| P | RedBot Mainboard | 1 |
| Q | Line Follower Board | 3 |
| R | Accelerometer Board | 1 |
| S* | Buzzer Board (SIK) | 1 |
| T* | Bumper Board (SIK) | 2 |
| U* | Bumper Whisker (SIK) | 2 |
| V* | #4-40 x 3/8" Screw (SIK) | 6 |
| W* | #4-40 Nylon Standoff (SIK) | 2 |
| X* | #4-40 Hex Nut (SIK) | 2 |
| Y | 3-Wire Jumper Cable (SIK) | 3 (5*) |
| Z | Battery Holder | 1 |
| AA* | AA Batteries (SIK) | 4 |
| AB* | Screwdriver (SIK) (Not Shown) | 1 |
| * Indicates parts included in the SIK for RedBot | ||
IMPORTANT: If you have the RedBot Kit, you will need 4x AA batteries.
Recommended Tools
None! The RedBot Kit does not require any additional tools. The SIK for RedBot comes with a screwdriver, which you will need to mount the Bumper Boards. If you bought the Bumper Boards separately, you will need a Phillips screwdriver.
WARNING: Do not attempt to remove chassis parts by squeezing them with pliers. You will break them, and the robot will be sad.
Image may be NSFW.
Clik here to view.
A Note About Directions
When we talk about the “front,” “left,” “right,” and “back” of the RedBot, we are referring to specific sides of the robot when viewed from above.
Image may be NSFW.
Clik here to view.
Notice that we consider the Mainboard to be on the “back” of the RedBot and the Bumper Whiskers and Line Follower Boards to be in the “front.”
1. Wheel Encoders (SIK)
Read on if you have the SIK for RedBot or are using the Wheel Encoder Kit. If not, skip to the next section.
The Wheel Encoder Kit is a simple add-on to any wheeled robot that can help measure the speed or distance the chassis travels.
Locate the Following:
| 1x Bottom Chassis Plate (A) | 2x Encoder Mount (F) | 2x Motor (K) |
| Image may be NSFW. Clik here to view.  | Image may be NSFW. Clik here to view.  | Image may be NSFW. Clik here to view. 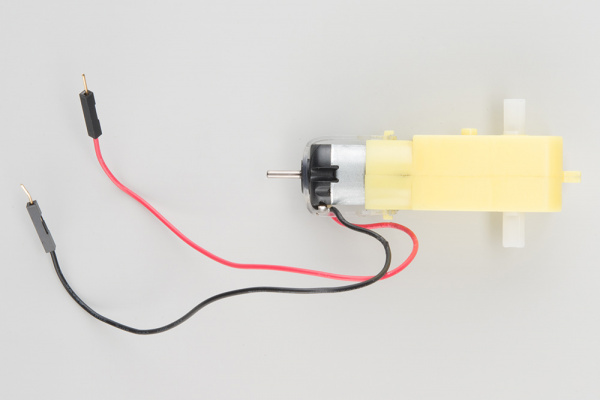 |
| 2x Encoder Magnet Plate (N) | 2x Encoder Hall Effect Sensor (O) | |
| Image may be NSFW. Clik here to view.  | Image may be NSFW. Clik here to view.  |
Add the Magnets
Slide the Encoder Magnet Plates (N) onto the metal shaft on the back of the Motors (K). Note that magnet side (silver) should face away from the motor.
Image may be NSFW.
Clik here to view.
Attach the Hall Effect Sensors
Left Encoder
Take one of the Encoder Mounts (F) and hold it so that the protruding slot is on the left. Push one of the encoder sensors through the first slot on the right. Note that the front of the sensor (marked “A 20L”) is facing to the left.
Image may be NSFW.
Clik here to view.
Loop the sensor and push it through the second (middle) slot. The “A 20L” marking should now be facing to the right.
Image may be NSFW.
Clik here to view.
Once more, push the sensor through the protruding slot on the left. Carefully pull the wires so there is no more slack in the mount. Make sure the whole sensor can be seen coming out of the final slot and the markings “A 20L” is pointing away from the mount (to the left in the picture).
Image may be NSFW.
Clik here to view.
Snap the assembled encoder mount into the back-left vertical slot of the Bottom Chassis Plate (A).
Image may be NSFW.
Clik here to view.
Right Encoder
The right encoder is a mirrored assembly of the left encoder.
Take the other Encoder Mount (F) and hold it so that the protruding slot is on the right. Push the other encoder sensor through the first slot on the left. Note that the front of the sensor (marked “A 20L”) is facing to the right.
Image may be NSFW.
Clik here to view.
Loop the sensor and push it through the second (middle) slot. The “A 20L” marking should now be facing to the left.
Image may be NSFW.
Clik here to view.
Once more, push the sensor through the protruding slot on the right. Carefully pull the wires so there is no more slack in the mount. Make sure the whole sensor can be seen coming out of the final slot and the markings “A 20L” is pointing away from the mount (to the right in the picture).
Image may be NSFW.
Clik here to view.
Snap the assembled encoder mount into the back-left vertical slot of the Bottom Chassis Plate (A). Note that the hall effect sensors are facing to the outside of the chassis.
Image may be NSFW.
Clik here to view.
2. Motors and Wheels
The motors add some motion to the RedBot by turning the nice, rubbery wheels.
NOTE: If you completed the previous Wheel Encoder (SIK) step, your motors will each have an encoder magnet plate attached to their rear shaft. However, they are not necessary to complete this step.
Locate the Following:
| 2x Front Motor Mount (C) | 2x Rear Motor Mount (D) | 2x Motor (K) |
| Image may be NSFW. Clik here to view. 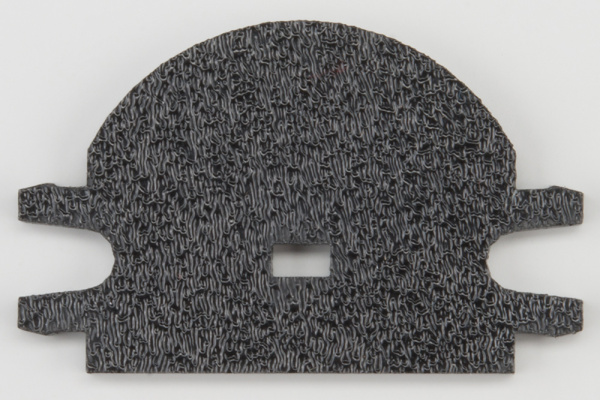 | Image may be NSFW. Clik here to view.  | Image may be NSFW. Clik here to view. |
| 2x Wheel (L) | ||
| Image may be NSFW. Clik here to view.  |
Attach Rear Motor Mounts
Hold the wires close to the middle of the Motor (K), and carefully slide a Rear Motor Mount (D) over the top of the motor.
Image may be NSFW.
Clik here to view.
Twist the Rear Motor Mount so that it snaps in place on the motor and the wires are centered in the grove of the motor mount.
Image may be NSFW.
Clik here to view.
Repeat the process for the second motor.
Image may be NSFW.
Clik here to view.
Attach the Front Motor Mounts
Slide a Front Motor Mount (C) onto the protruding eyelet on the front of a Motor (K). Ensure the rounded sides of the motor mounts are facing the same way.
Image may be NSFW.
Clik here to view.
Repeat the process for the second motor.
Image may be NSFW.
Clik here to view.
Add the Motor Assemblies
Snap one of the motor assemblies into the left 2 horizontal slots of the Bottom Chassis Plate (A). Make sure that the rounded edges of the motor mounts and the wires are facing the inside of the RedBot.
Image may be NSFW.
Clik here to view.
Snap the other motor assembly into the right 2 horizontal slots of the Bottom Chassis Plate (A). Make sure that the rounded edges of the motor mounts and the wires are facing the inside of the RedBot.
Image may be NSFW.
Clik here to view.
Attach the Wheels
Slide one Wheel (L) onto the plastic shaft of a motor (K). Make sure to line up the inside notches of the wheel to the motor shaft notches.
Image may be NSFW.
Clik here to view.
Repeat with the other wheel.
Image may be NSFW.
Clik here to view.
3. Line Follower
In this section, you will be putting standoffs on the RedBot Sensor - Line Followers. Then you will add the sensors to your chassis.
Locate the Following:
| 1x Line Follower Mount (I) | 1x Line Follower Mount Plate (J) | 3x Line Follower Board (Q) |
| Image may be NSFW. Clik here to view.  | Image may be NSFW. Clik here to view. 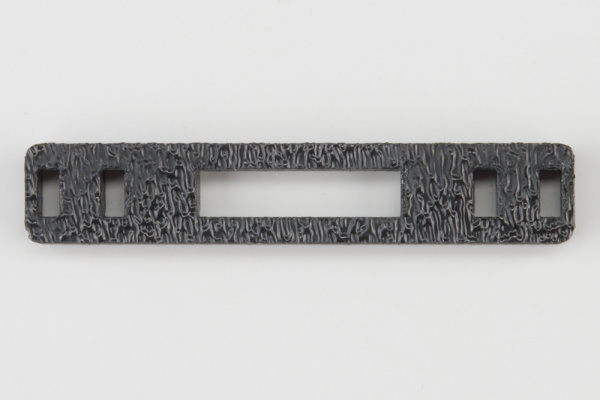 | Image may be NSFW. Clik here to view. 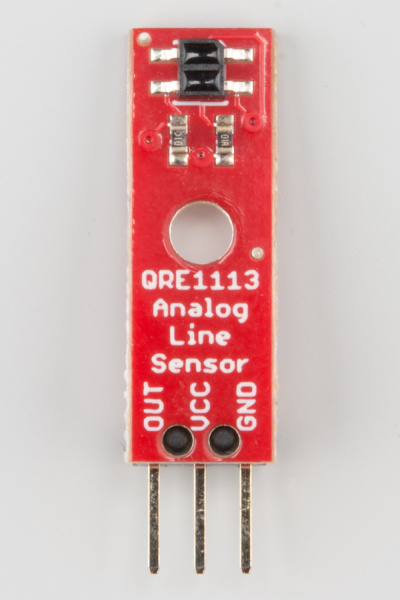 |
| 3x 3-Wire Jumper Cable (Y) | ||
| Image may be NSFW. Clik here to view.  | > |
Construct the Line Follower Assembly
Attach the 3 Line Follower Boards (Q) to the Line Follower Mount (I) such that the rectangular pegs in the Line Follower Mount poke through the mounting holes in the Line Follower Boards. Make sure the sensors are facing away from the clip of the mount.
Image may be NSFW.
Clik here to view.
Place the Line Follower Mount Plate (J) on top of the Line Follower Mount (I) so that the center clip of the Line Follower Mount is poking through the center slot of the Line Follower Mount Plate.
Image may be NSFW.
Clik here to view.
Attach the Cables
You will need to connect a 3-Wire Jumper Cable (Y) to each of the Line Follower Boards (Q). Note the color of the wire attached to each pin.
Line Follower Connections:
| Jumper Wire Color | RedBot Sensor - Line Follower |
|---|---|
| Black | GND |
| Red | VCC |
| White | OUT |
Attach all 3 cables to the 3 Line Follower Boards.
Image may be NSFW.
Clik here to view.
Add the Line Follower Assembly
Snap the line follower assembly into bottom of the front horizontal slot of the RedBot. Route the cables through the large hole in the bottom plate.
Image may be NSFW.
Clik here to view.
4. Mechanical Bumpers (SIK)
Read on if you have the SIK for RedBot or are using the Mechanical Bumpers. If not, skip to the next section.
You will need to prepare the music wire by bending the wire itself. Then, you will add standoffs and screws to your mechanical bumpers, followed by adding the mechanical bumpers to the RedBot chassis.
Locate the Following:
| 1x Top Chassis Plate (B) | 2x Bumper Board (T) | 2x Bumper Whisker (U) |
| Image may be NSFW. Clik here to view. 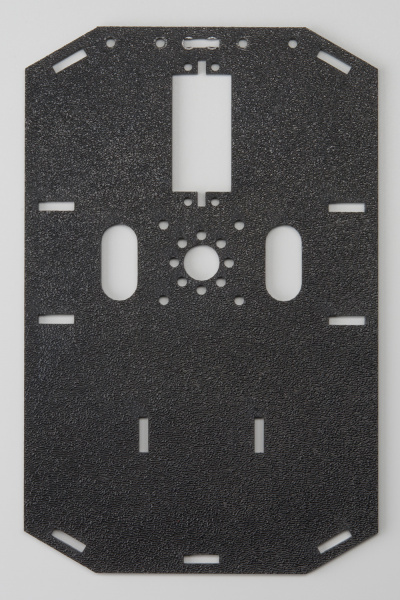 | Image may be NSFW. Clik here to view. 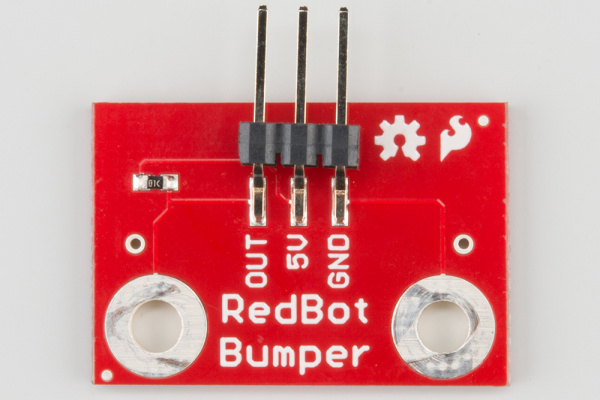 | Image may be NSFW. Clik here to view.  |
| 6x #4-40 x 3/8" Screw (V) | 2x #4-40 Nylon Standoff (W) | 2x #4-40 Hex Nut (X) |
| Image may be NSFW. Clik here to view.  | Image may be NSFW. Clik here to view.  | Image may be NSFW. Clik here to view.  |
| 2x 3-Wire Jumper Cable (Y) | 1x Phillips Screwdriver (AB) | |
| Image may be NSFW. Clik here to view. | Image may be NSFW. Clik here to view.  |
Prepare the Mechanical Bumpers
Using a Phillips screwdriver (AB), screw a #4-40 x 3/8" screw (V) and #4-40 hex nut (X) to one of the two large mechanical bumper holes.
Image may be NSFW.
Clik here to view.
Time to bend the whisker! It is easy to bend the whisker with needle nose pliers. However, there is a trick to bend the whisker using the mechanical bumper PCB itself. First, stick one of the whiskers (U) through one of the smaller side holes. It only needs to stick out a little bit.
Image may be NSFW.
Clik here to view.
Bend the whisker 90 degrees.
Image may be NSFW.
Clik here to view.
Bend the whisker 90 degrees again.
Image may be NSFW.
Clik here to view.
Now that the whisker is bent, take the wire out of the PCB hole. Add a #4-40 x 3/8" Screw (V) from the bottom, and loop the bent whisker around the screw. It is very important that you do not let the whisker touch the other side’s #4-40 hex nut or screw, since that is what triggers the sensor. Leave a little space between the wire and other side’s nut.
Image may be NSFW.
Clik here to view.
Twist a #4-40 nylon standoff on top of the screw to secure the wire.
Image may be NSFW.
Clik here to view.
Double check that the wire does not touch the other side’s #4-40 hex nut and #4-40 x 3/8" screw.
Image may be NSFW.
Clik here to view.
Do this for the other mechanical bumper. Take note of which side your #4-40 x ¾" standoff is on for the first mechanical bumper. Do the opposite for the other bumper. Double check that there is one mechanical bumper that has a #4-40 x ¾" standoff on the right side of the “RedBot Bumper” silkscreen and one that has a #4-40 x ¾" standoff on the left side.
Image may be NSFW.
Clik here to view.
Add the Bumpers
Locate the horizontal slot on the front of the Top Chassis Plate (B).
Image may be NSFW.
Clik here to view.![]()
Using two #4-40 x 3/8" Screws (V), tighten down the bumper assemblies with the two wires pointing in opposite directions on the bottom side of the top chassis plate. The mechanical bumpers' header pins should be pointing toward the chassis piece.
Image may be NSFW.
Clik here to view.
Attach the Cables
You will need to connect a 3-Wire Jumper Cable (Y) to each of the Bumper Boards (T). Note the color of the wire attached to each pin.
Bumper Connections:
| Jumper Wire Color | RedBot Sensor - Line Follower |
|---|---|
| Black | GND |
| Red | VCC |
| White | OUT |
Attach both cables to the 2 Bumper Boards.
Image may be NSFW.
Clik here to view.
Route the cables through the left and right oval cutouts, respectively.
Image may be NSFW.
Clik here to view.
5. Chassis
With the motors and a few sensors attached, we can assemble the main body of the robot.
Locate the Following:
| 4x Side Strut (E) | 1x Nub Caster (M) | |
| Image may be NSFW. Clik here to view. 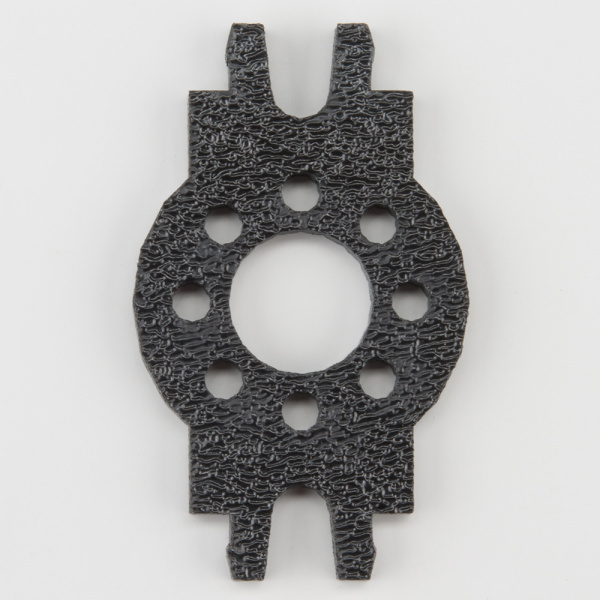 | Image may be NSFW. Clik here to view.  |
You will also need the Top Chassis Plate and Bottom Chassis Plate assemblies, which have any additional parts and sensors you attached in previous steps.
Attach the Nub Caster
Snap the Nub Caster (M) into the slot on the back of the Bottom Chassis Plate assembly. Make sure the Nub Caster is on the side opposite the motors (the bottom side).
Image may be NSFW.
Clik here to view.
Add the Side Struts
Snap the four Side Struts (E) into the diagonal slots on the four corners of the Bottom Chassis Plate assembly.
Image may be NSFW.
Clik here to view.
Route the Cables
Position the Top Chassis Plate assembly over the Bottom Chassis Plate assembly. Route the wires and cables through the left and right oval slots in the Top Chassis Plate assembly as shown. Note that SIK-only cables are listed with an asterisk (*).
Cable Routing:
| Cable Connection | Oval Side |
|---|---|
| Left Bumper Sensor* | Left |
| Right Bumper Sensor* | Right |
| Left Line Follower | Left |
| Middle Line Follower | Right |
| Right Line Follower | Right |
| Left Motor wires (red and black) | Left |
| Right Motor wires (red and black) | Right |
| Left Wheel Encoder* | Left |
| Right Wheel Encoder* | Right |
| * Indicates parts included in the SIK for RedBot | |
Image may be NSFW.
Clik here to view.
Attach Top Chassis Plate Assembly
Carefully snap the Top Chassis Plate assembly onto the side struts and motor mounts. If you have the Bumpers installed, make sure the boards are between the top and bottom plates.
Image may be NSFW.
Clik here to view.
6. Mainboard
In this section, you will add brains of the robot: the RedBot Mainbooard.
Locate the Following:
| 2x Mainboard Mount (G) | 1x RedBot Mainboard (P) | |
| Image may be NSFW. Clik here to view.  | Image may be NSFW. Clik here to view. 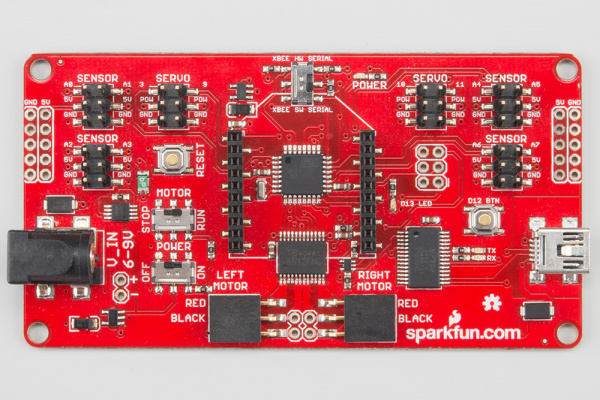 | > |
You will also need the full chassis assembly, which contains any additional parts and sensors you attached in previous steps.
Attach the Mainboard Mounts
Snap the two Mainboard Mounts (G) into the vertical slots in the back of the top chassis plate.
Image may be NSFW.
Clik here to view.
Add the Mainboard
Snap the Mainboard (P) into the lowest of the notches on the Mainboard Mounts (G). Make sure the power jack is facing the left side of the robot.
Image may be NSFW.
Clik here to view.
Connecting the Cables
It is time to connect the jumper wires; it’s really important that the connections are right.
Pin Out
You can follow along with the pin out tables or scroll down for a Fritzing diagram. If you have the RedBot Kit, you do not need to connect the sensors from the SIK. Sensors for the SIK will be marked with (SIK).
Please note: When you have the RedBot upright and the front of the chassis facing away from you, “left” sensors/motors will be on the left side and “right” sensors/motors will be on the right side.
Image may be NSFW.
Clik here to view.
Left Line Follower:
| RedBot Mainboard Pins | Jumper Wires | Left Line Follower Board |
|---|---|---|
| A3 | 3-Wire Jumper Cable - White | OUT |
| 5V | 3-Wire Jumper Cable - Red | VCC |
| GND | 3-Wire Jumper Cable - Black | GND |
Middle Line Follower:
| RedBot Mainboard Pins | Jumper Wires | Middle Line Follower Board |
|---|---|---|
| A6 | 3-Wire Jumper Cable - White | OUT |
| 5V | 3-Wire Jumper Cable - Red | VCC |
| GND | 3-Wire Jumper Cable - Black | GND |
Right Line Follower:
| RedBot Mainboard Pins | Jumper Wires | Right Line Follower Board |
|---|---|---|
| A7 | 3-Wire Jumper Cable - White | OUT |
| 5V | 3-Wire Jumper Cable - Red | VCC |
| GND | 3-Wire Jumper Cable - Black | GND |
Left Mechanical Bumper (SIK):
| RedBot Mainboard Pins | Jumper Wires | Left Bumper Board |
|---|---|---|
| 3 | 3-Wire Jumper Cable - White | OUT |
| POW | 3-Wire Jumper Cable - Red | 5V |
| GND | 3-Wire Jumper Cable - Black | GND |
Right Mechanical Bumper (SIK):
| RedBot Mainboard Pins | Jumper Wires | Right Bumper Board |
|---|---|---|
| 11 | 3-Wire Jumper Cable - White | OUT |
| POW | 3-Wire Jumper Cable - Red | 5V |
| GND | 3-Wire Jumper Cable - Black | GND |
Left Motor:
| RedBot Mainboard Pins | Left Motor Jumper Wires |
|---|---|
| LEFT MOTOR - RED | Soldered on Motor Jumper Wire - RED |
| LEFT MOTOR - BLACK | Soldered on Motor Jumper Wire - BLACK |
Right Motor:
| RedBot Mainboard Pins | Right Motor Jumper Wires |
|---|---|
| RIGHT MOTOR - RED | Soldered on Motor Jumper Wire - RED |
| RIGHT MOTOR - BLACK | Soldered on Motor Jumper Wire - BLACK |
Left Wheel Encoder (SIK):
| RedBot Mainboard Pins | Jumper Wires | Left Wheel Encoder |
|---|---|---|
| A2 | 3-Wire Jumper Cable - White | OUT |
| POW | 3-Wire Jumper Cable - Red | 5V |
| GND | 3-Wire Jumper Cable - Black | GND |
Right Wheel Encoder (SIK):
| RedBot Mainboard Pins | Jumper Wires | Right Wheel Encoder |
|---|---|---|
| 10 | 3-Wire Jumper Cable - White | OUT |
| POW | 3-Wire Jumper Cable - Red | 5V |
| GND | 3-Wire Jumper Cable - Black | GND |
Fritzing Diagram
Image may be NSFW.
Clik here to view.
Look at all those connections! Having a hard time seeing the image? Click on the Fritzing image to see a bigger diagram.
7. Accelerometer
Time to add the RedBot accelerometer! If you do not have headers on your accelerometer already (older revisions of the RedBot accelerometer did not have headers), we recommend soldering on female headers to your accelerometer to fit on top of the RedBot Mainboard’s headers.
Locate the Following:
| 1x Accelerometer Board (R) | ||
| Image may be NSFW. Clik here to view.  |
Add the RedBot Accelerometer
Locate the SENSOR port with “A4” and “A5” marked on the RedBot Mainboard. Line up the “A4” pin on the accelerometer to the “A4” male header pin on the RedBot Mainboard, and attach the Accelerometer Board (R).
Image may be NSFW.
Clik here to view.
8. Buzzer (SIK)
Read on if you have the SIK for RedBot or are using the RedBot Buzzer. If not, skip to the next section.
Adding the RedBot Buzzer is nice and easy!
Locate the Following:
| 1x Buzzer Board (S) | ||
| Image may be NSFW. Clik here to view. 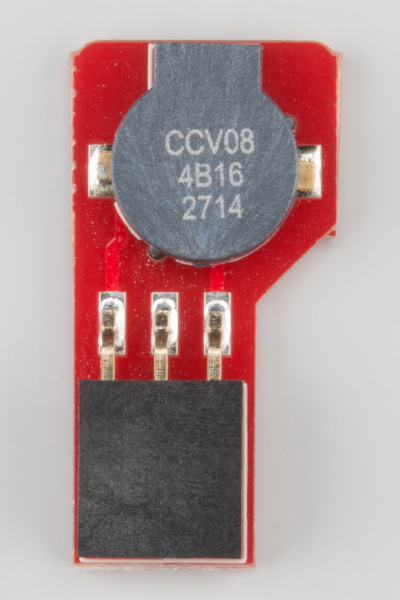 |
Add the RedBot Buzzer
Locate the SERVO port with “9” marked on the RedBot Mainboard. With the buzzer and female header side of the Buzzer Board (S) facing to the left, place the Buzzer Board on top of the “9”, “POW”, and “GND” male header pins.
Image may be NSFW.
Clik here to view.
9. Batteries
We need to give some power to the RedBot. If you do not have the SIK for RedBot, you will need to provide your own AA batteries.
Locate the Following:
| 1x Battery Pack Clip (H) | 1x Battery Holder (Z) | 4x AA Batteries* (AA) |
| Image may be NSFW. Clik here to view.  | Image may be NSFW. Clik here to view. 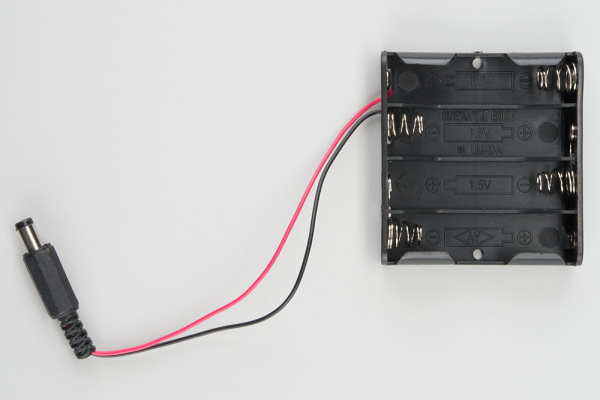 | Image may be NSFW. Clik here to view.  |
| * Provided in the SIK for RedBot | ||
Insert Batteries
Insert the AA batteries into the Battery Holder (Z). Makes sure the batteries are facing the correct direction, as per the markings inside of the Battery Holder.
Image may be NSFW.
Clik here to view.
Attach Battery Pack
Insert the Battery Holder (Z) with batteries into the back cavity of the RedBot. Have the barrel jack cable facing to the left of the robot.
Image may be NSFW.
Clik here to view.
Insert the Battery Pack Clip (H) on top of the battery pack.
Image may be NSFW.
Clik here to view.
Twist the clip so that it rests on top of the battery pack.
Image may be NSFW.
Clik here to view.
Push the clip down into the vertical slots in the Bottom Chassis Plate so it snaps in place.
Image may be NSFW.
Clik here to view.
Route the barrel jack cable out of the left side of the RedBot and up to the Mainboard. Plug it into the barrel jack adapter labeled V_IN.
Image may be NSFW.
Clik here to view.
Changing the Batteries
If you find that you need to replace the batteries in the RedBot, the process is simple. Unplug the battery pack from the Mainboard.
Image may be NSFW.
Clik here to view.
Turn the RedBot over and push on the Battery Holder through the hole in the Bottom Chassis Plate. This will cause the Battery Pack Clip to unsnap from the Bottom Chassis Plate.
Image may be NSFW.
Clik here to view.
Slide the Battery Pack and Clip out from the back of the RedBot.
Image may be NSFW.
Clik here to view.
Change the batteries, and follow the steps in Attach Battery Pack section above to put the Battery Pack back in the RedBot.
Resources and Going Further
What a rock star! With all that building, we bet you are ready to start cruising. We recommend continuing to the Experiment Guide for RedBot with Shadow Chassis to learn how to program your new robot friend.
Experiment Guide for RedBot with Shadow Chassis
Upgrades
You might have noticed some odd-looking hole patterns in the top plate and side struts. The RedBot’s chassis is manufactured to accept Actobotics parts. Feel free to add other mounts, gimbals, servos, and claws!
Image may be NSFW.
Clik here to view.
Resources
GitHub repositories:
- RedBot
- RedBot with Optical Encodery
- RedBot Accelerometer
- RedBot Line_Sensor
- RedBot Whisker Bumper
- RedBot Buzzer
learn.sparkfun.com |CC BY-SA 3.0 | SparkFun Electronics | Niwot, Colorado